Video
Abstract
Time-optimal path planning in high winds for a turning-rate constrained UAV is a challenging problem to solve and is important for deployment and field operations. Previous works have used trochoidal path segments comprising straight and maximum-rate turn segments, as optimal extremal paths in uniform wind conditions. Current methods iterate over all candidate trochoidal trajectory types and select the one that is time-optimal; however, this exhaustive search can be computationally slow. In this paper, we introduce a method to decrease the computation time. This is achieved by reducing the number of candidate trochoidal trajectory types by framing the problem in the air-relative frame and bounding the solution within a subset of candidate trajectories. Our method reduces overall computation by 37.4% compared to pre-existing methods in Bang-Straight-Bang trajectories, freeing up computation for other onboard processes and can lead to significant total computational reductions when solving many trochoidal paths. When used within the framework of a global path planner, faster state expansions help find solutions faster or compute higher-quality paths. We also release our open-source codebase as a C++ package.
Interactive Demo
Results
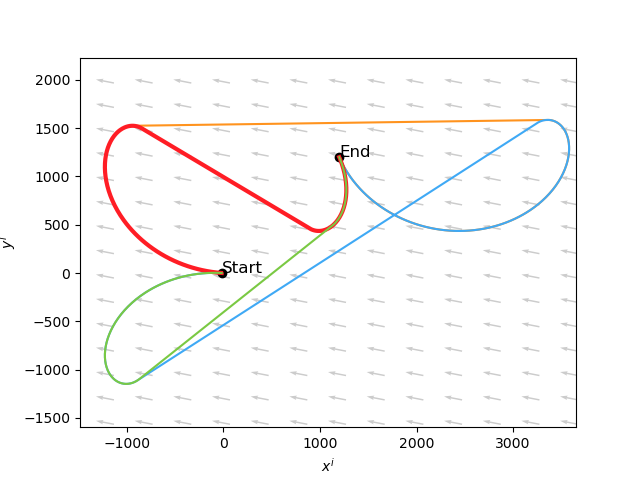
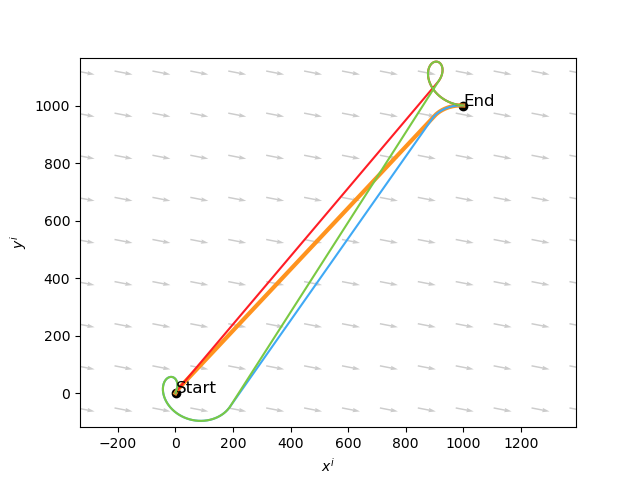
Qualitative
Quantitative
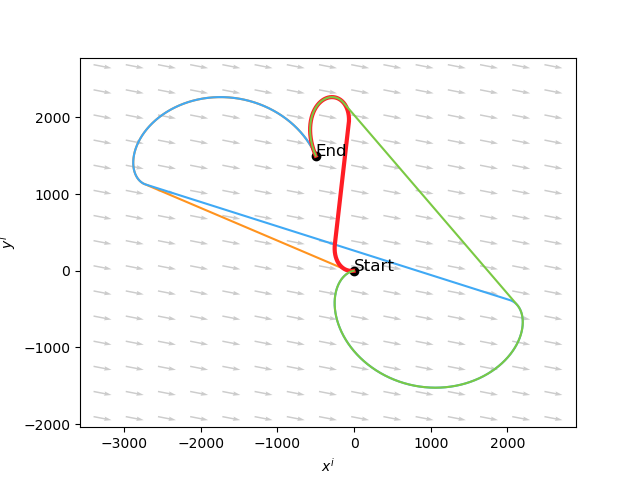
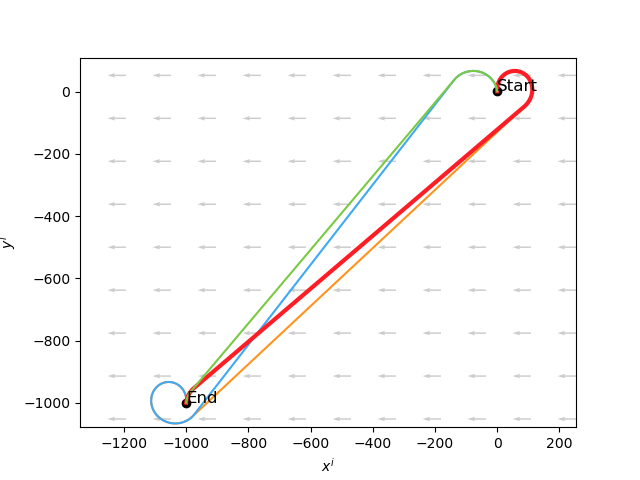
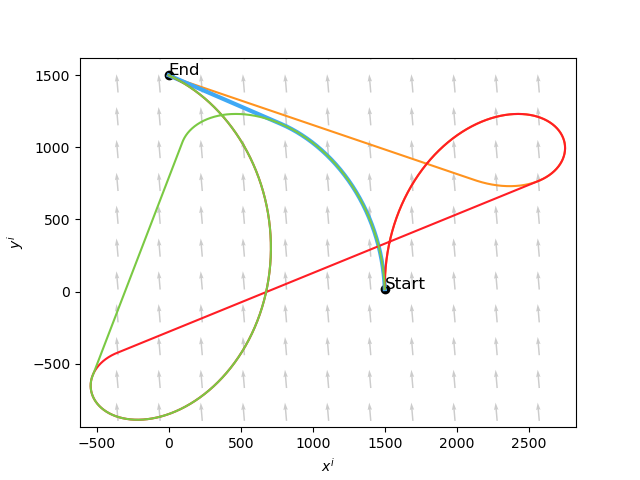
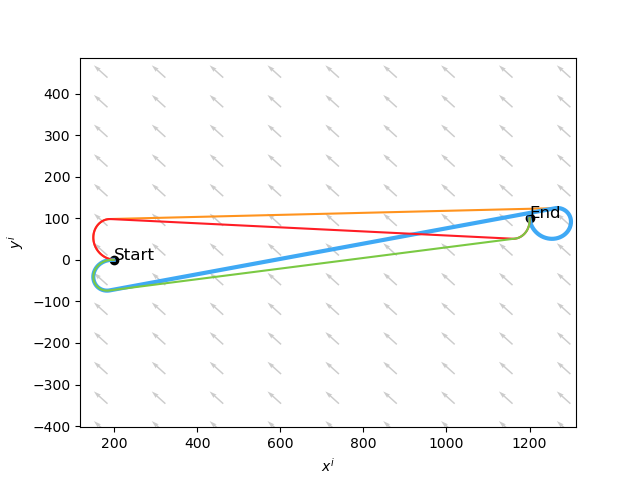
The average run-time over 10,000 random configurations for BSB trajectories on a 3.40 GHz CPU was 1.4224 ms compared to the baseline method of 2.2711 ms (Fig. 1 shows six randomly sampled trajectories). The testing results yielded a 37.4% improvement over the baseline method.
BibTex
@article{moon2023timeoptimal,
title={Time-Optimal Path Planning in a Constant Wind for Uncrewed Aerial Vehicles using Dubins Set Classification},
author={Brady Moon and Sagar Sachdev and Junbin Yuan and Sebastian Scherer},
year={2023},
journal = {IEEE Robotics and Automation Letters},
publisher = {IEEE},
doi = {10.1109/LRA.2023.3333167},
url = {https://arxiv.org/pdf/2306.11845.pdf},
video = {https://youtu.be/qOU5gI7JshI}
}