Abstract
A high-quality estimate of wind fields can potentially improve the safety and performance of Unmanned Aerial Vehicles (UAVs) operating in dense urban areas. Computational Fluid Dynamics (CFD) simulations can help provide a wind field estimate, but their accuracy depends on the knowledge of the distribution of the inlet boundary conditions. This paper provides a real-time methodology using a Particle Filter (PF) that utilizes wind measurements from a UAV to solve the inverse problem of predicting the inlet conditions as the UAV traverses the flow field. A Gaussian Process Regression (GPR) approach is used as a surrogate function to maintain the real-time nature of the proposed methodology. Real-world experiments with a UAV at an urban test-site prove the efficacy of the proposed method. The flight test shows that the 95% confidence interval for the difference between the mean estimated inlet conditions and mean ground truth measurements closely bound zero, with the difference in mean angles being between −3.680° and 1.250° and the difference in mean magnitudes being between −0.206 m/s and 0.020 m/s.
Video
Method
An overview of our proposed methodology is seen in the Figure 1. A particle filter is used to estimate the wind inlet conditions by utilizing the wind measurements from the UAV as well as the predicted wind measurements at the UAV state using a surrogate function trained on CFD simulations.
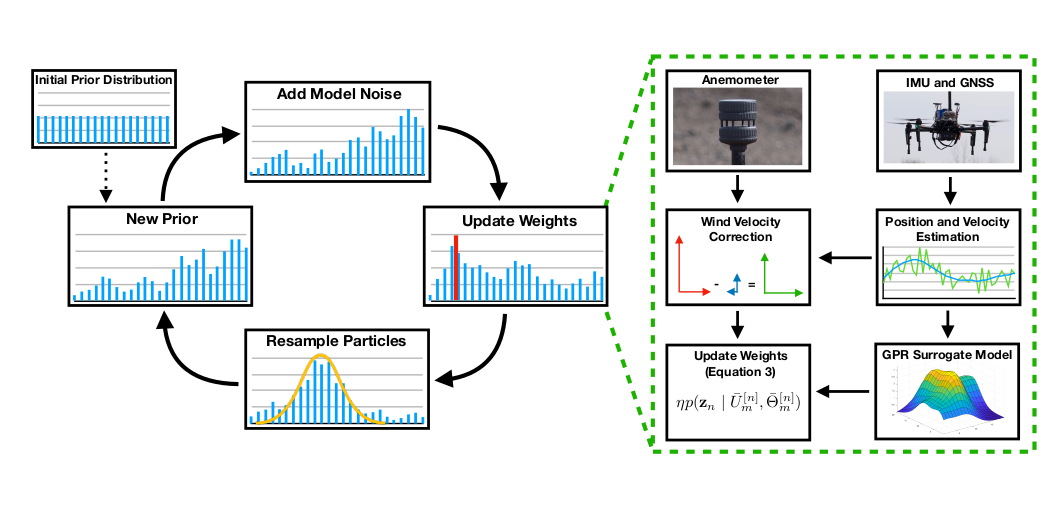
Wind measurements are taken by an onboard ultrasonic anemometer and corrected for UAV motion and magnitude bias. The North and East components of the corrrected wind speeds are calculated as \(w_N = (w_m^{[raw]} - \alpha )\cos(w_{\theta}^{[raw]}) - V_N\) and \(w_E = (w_m^{[raw]} - \alpha )\sin(w_{\theta}^{[raw]}) - V_E\), with \(\alpha\) being the bias correction factor.
A Gaussian Process Regression (GPR) was used as the  surrogate function for the local wind predictions. We ran CFD simulations at various inlet conditions in order to train the GPR. An example of one of these simulations is seen in the figure on the right.
surrogate function for the local wind predictions. We ran CFD simulations at various inlet conditions in order to train the GPR. An example of one of these simulations is seen in the figure on the right.
The particle filter updates its weights using the predicted wind measurements from the GPR according to the current inlet condition estimates along with the corrected wind measurements from the anemometer.
Field Validation
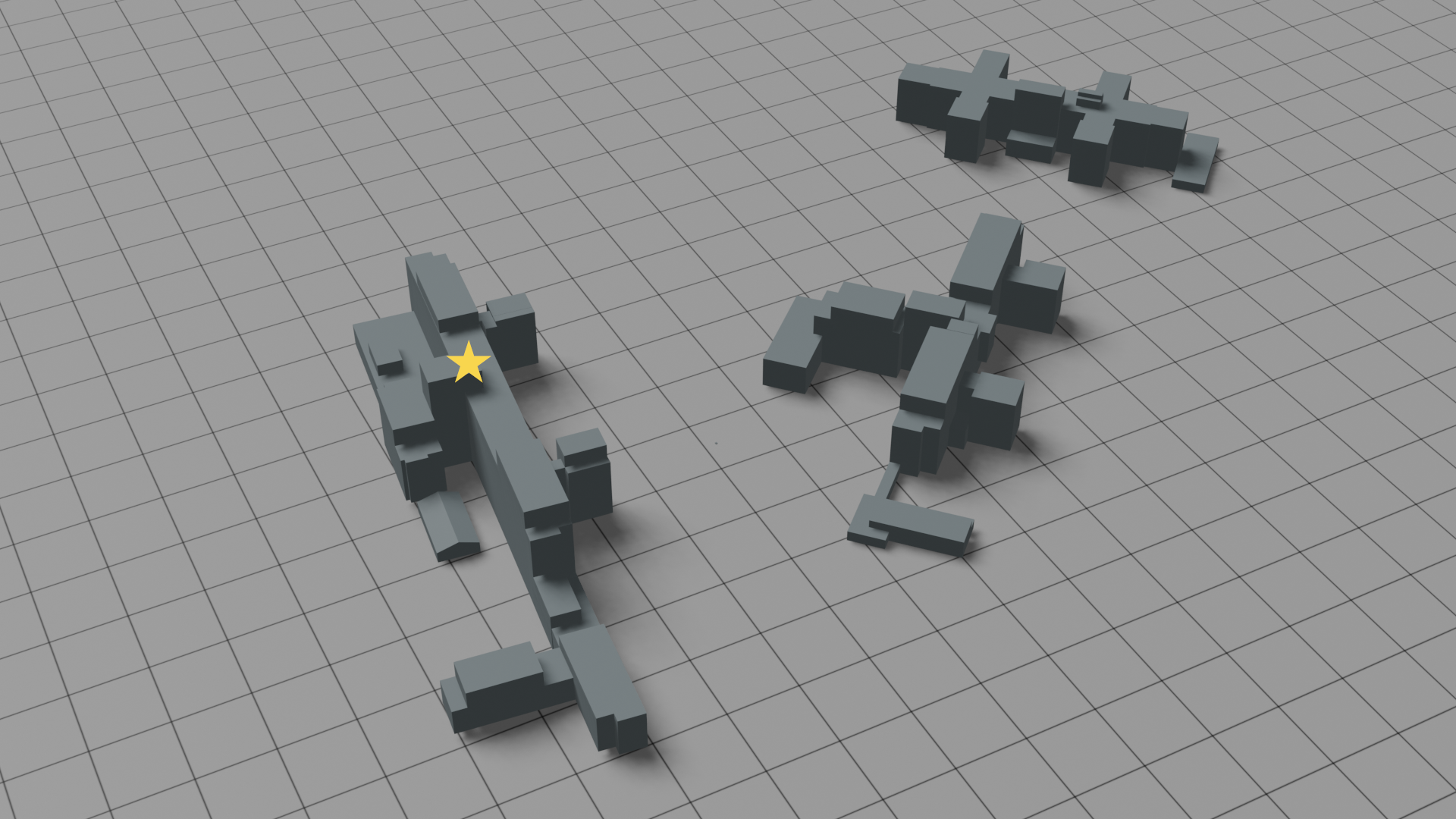
Our chosen test site is located on an elevated piece of land with around ten buildings, all ranging in heights of 5 to 35 meters. The complex of buildings effectively replicates a typical urban environment and allows for complex interactions of the wind and buildings. An image and model of the test site are seen the images below. The size of the site is roughly 300×250 meters. To serve as a pseudo ground truth for the inlet conditions, a weather station was placed in the location marked with a star on top of the tallest building.

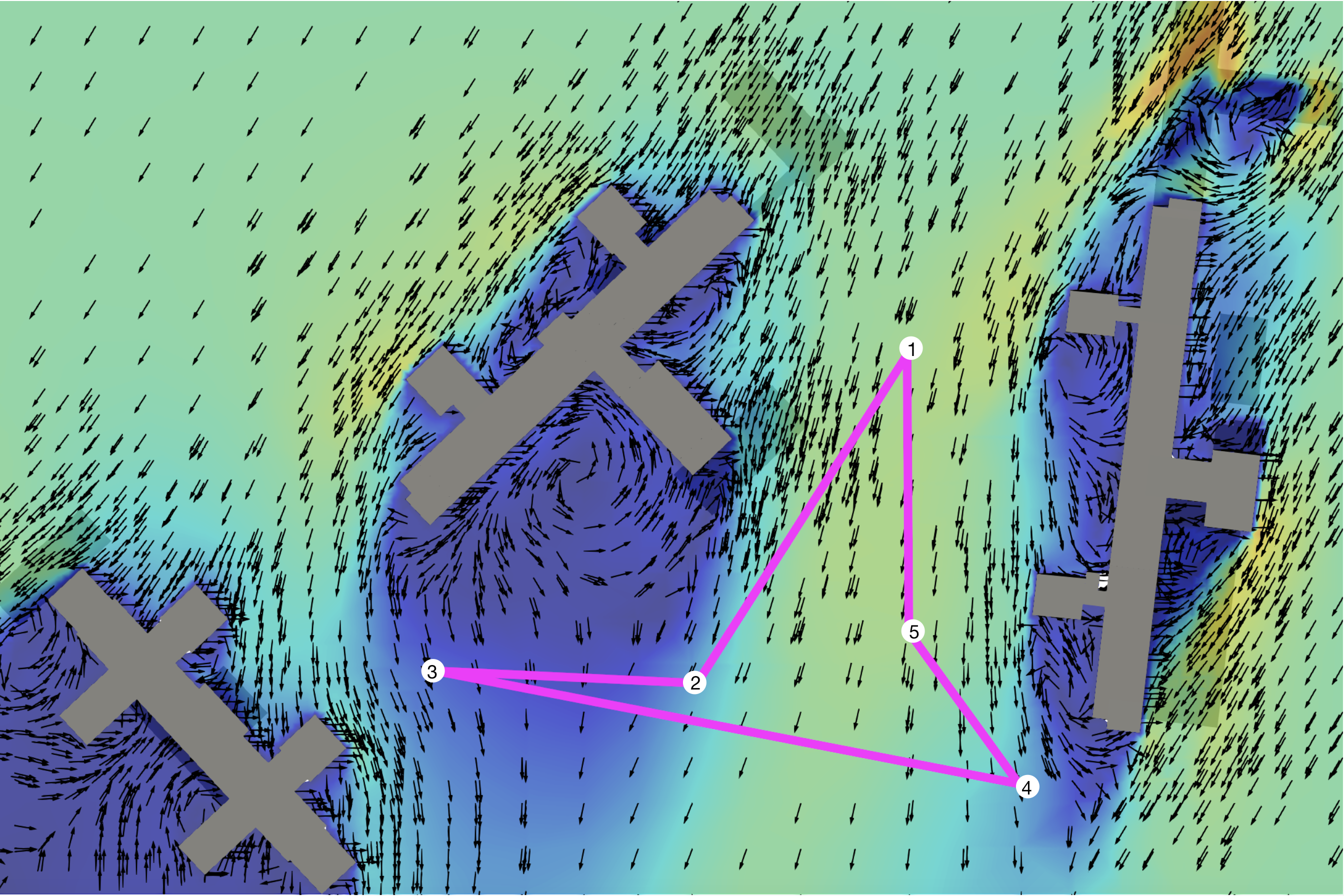
The tests were conducted with a DJI M100. The flight path was followed autonomously and is shown below.

Results
The 95% confidence interval for the difference between the mean estimated inlet angle and mean ground truth angle was -3.680° and 1.250°. The 95% confidence interval for the difference between the mean estimated inlet magnitude and mean ground truth magnitude was -0.206 m/s and 0.020 m/s. Zero lies within the bounds of both confidence intervals, thus showing the statistical significance of these results.
Project Members
Publication
@inproceedings{patrikar2020,
title = {Wind and the City: Utilizing {UAV}-Based In-Situ Measurements for Estimating Urban Wind Fields},
author = {Patrikar, Jay and Moon, Brady and Scherer, Sebastian},
year = {2020},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
url = {https://www.ri.cmu.edu/publications/wind-and-the-city-utilizing-uav-based-in-situ-measurements-for-estimating-urban-wind-fields/},
video = {https://youtu.be/U4XdYgSJRZM}
}