Past Research

Autonomous Mission Execution for Teams of Reconnaissance UAVs | 2021 - 2025
AirLab | Carnegie Mellon University
- Developing autonomy algorithms to search for and track targets at sea
- Testing on fixed-wing platforms with the Office of Naval Research
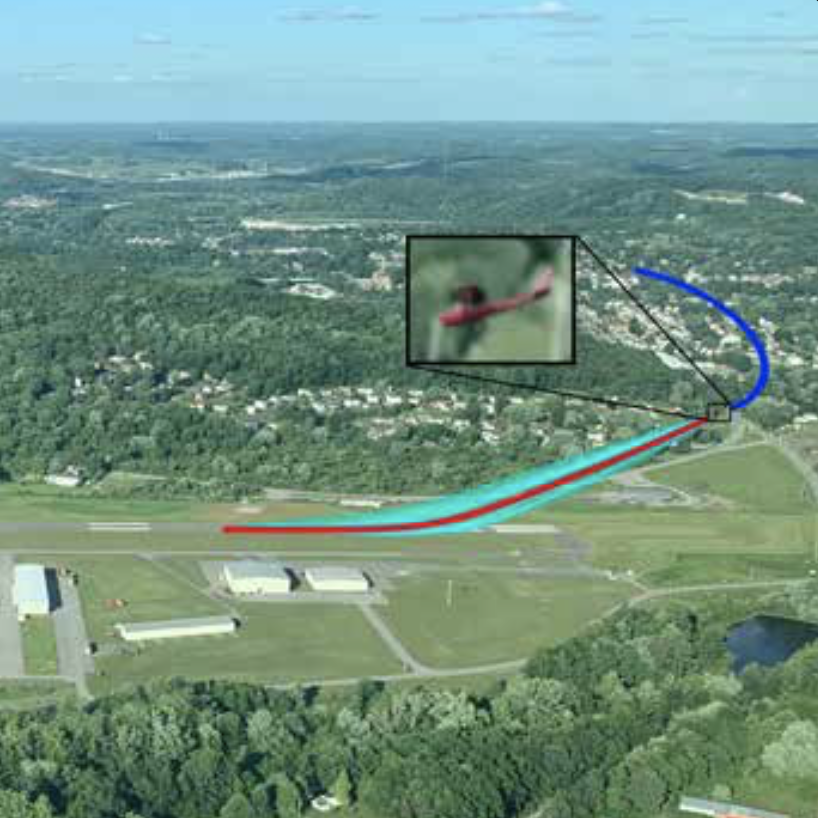
Safe and Seamless Operation of Manned and Unmanned Aircraft in Shared Airspace | 2020 - 2023
AirLab | Carnegie Mellon University
- Long-range aircraft detection and tracking strategies using a monocular camera
- Constructing real-world dataset spanning many months of small aircraft at airports
- Predicting future trajectories of aircraft using Graph Attention Networks
Estimating Urban Wind Fields Using UAV-Based Measurements | 2020
AirLab | Carnegie Mellon University
- Through real-world experiments we proved our method accurately estimates wind inlet conditions using the wind measurements from a flying UAV. Read more
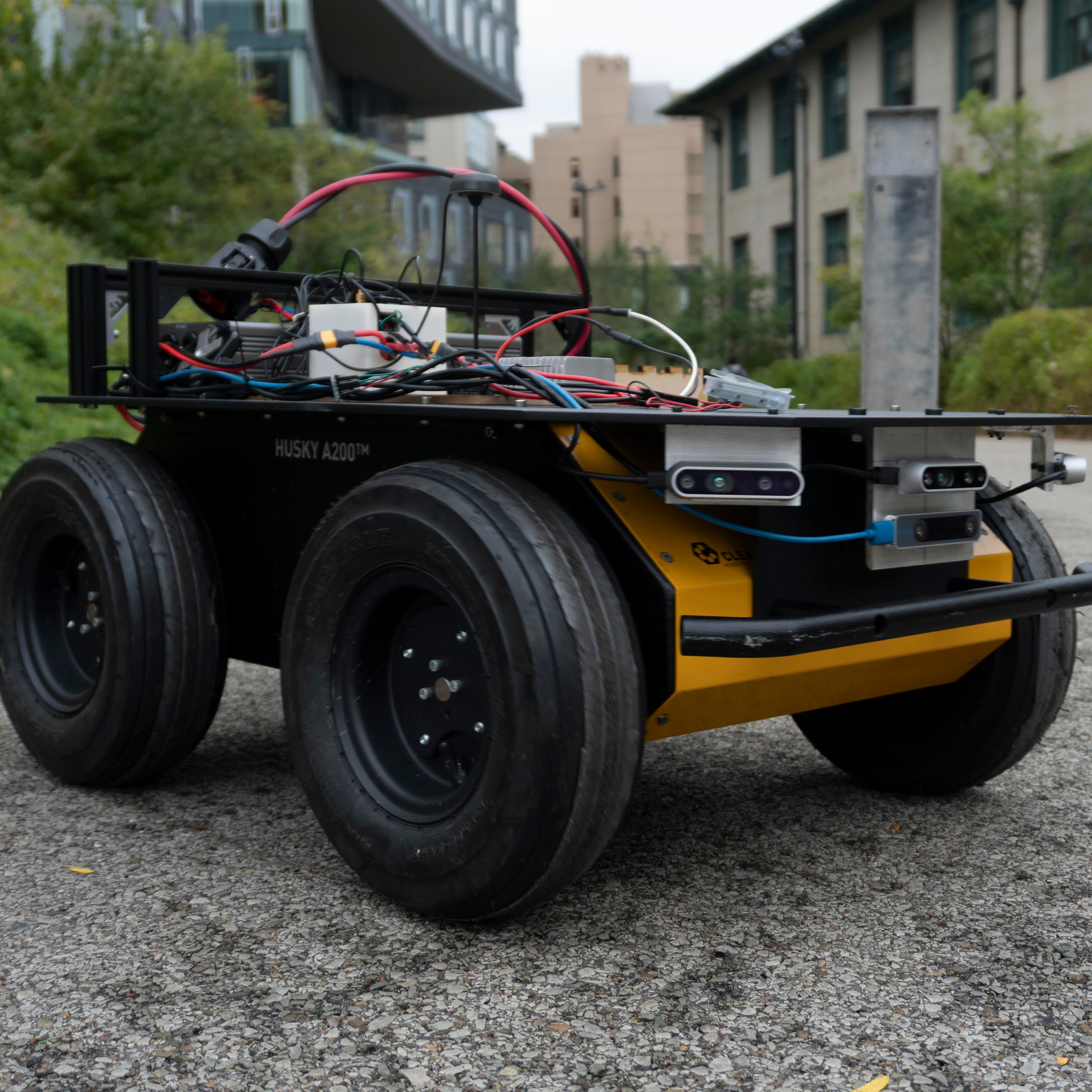
Goods Delivery Energy Productivity | 2019 - 2022
AirLab | Carnegie Mellon University
- Evaluating the impact of autonomous robots on the energy productivity of package delivery
- Energy-based flight risk assessment for multirotor UAVs
- Learning and validating energy models for autonomous robots
- Learning motion primitives for a UAV to fly in windy urban environments
UAV Gesture Commands | 2018-19
MAGICC Lab | Brigham Young University
- Designed and trained a model to classify ten gestures with an accuracy of 95% using accelerometer and gyroscope measurements.
- Designed and tested intuitive gestures and behaviors for natural directing of a fleet of UAVs ICUAS 2019 | SN Applied Sciences 2021
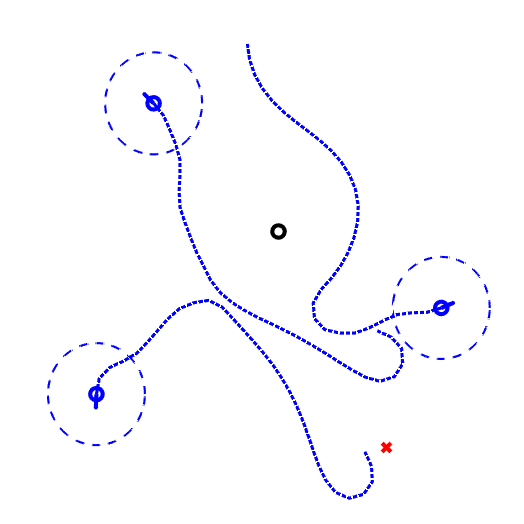
Multi-Mission Project | 2017-19
MAGICC Lab | Brigham Young University
- Developed a search algorithm for cooperating UAVs which maximizes area knowledge and the number of tracked targets using Gaussian process regressions
- Implemented a Gaussian Mixture Model Kalman filter for more accurate target tracking with heterogeneous sensors ICUAS 2018