Paper accepted to RA-L and ICRA 2024
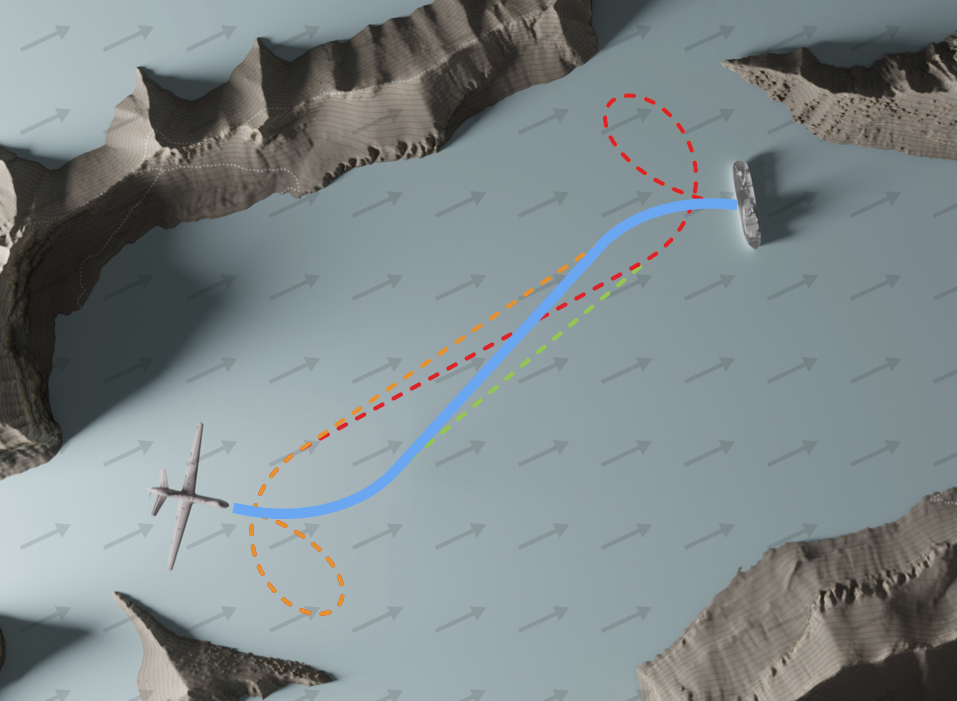
Our paper titled “Time-Optimal Path Planning in a Constant Wind for Uncrewed Aerial Vehicles using Dubins Set Classification” was accepted to IEEE Robotics and Automation Letters (RA-L).

Kiri in the news and updates
Though I am no longer involved in the leadership at Kiri, it is fun to see the latest progress of the company as a whole and its latest publicity and awards.
Paper accepted to IROS 2020
Our paper titled “Wind and the City: Utilizing UAV-Based In-Situ Measurements for Estimating Urban Wind Fields” was accepted to IROS 2020.

Kiri meets its funding goal on Kickstarter
Our screenless smart toy was launched and successfully funded on Kickstarter. It is amazing to see our team’s vision become a reality. I can’t wait to see Kiri improve learning for many children.
2019 NSF Graduate Research Fellowship
I have been selected to receive a 2019 National Science Foundation Graduate Research Fellowship. The Fellowship provides financial support for three years.

"BYU hosts largest underwater robotics competition in Utah"
This was my last year as the student director of Utah Underwater Robotics.